Lecture 11 核方法
主要内容
- 核化
- SVM 对偶公式的基扩展
- “核技巧”;特征空间点积的快速计算
- 模块化学习
- 从特征变换中分离出“学习模块”
- 表示定理
- 构造核函数
- 常见核函数及其特性概述
- Mercer 定理
- 学习非常规数据类型
1. SVM 核化
通过基扩展进行特征变换;通过对核进行直接评估来实现加速 —— “核技巧”
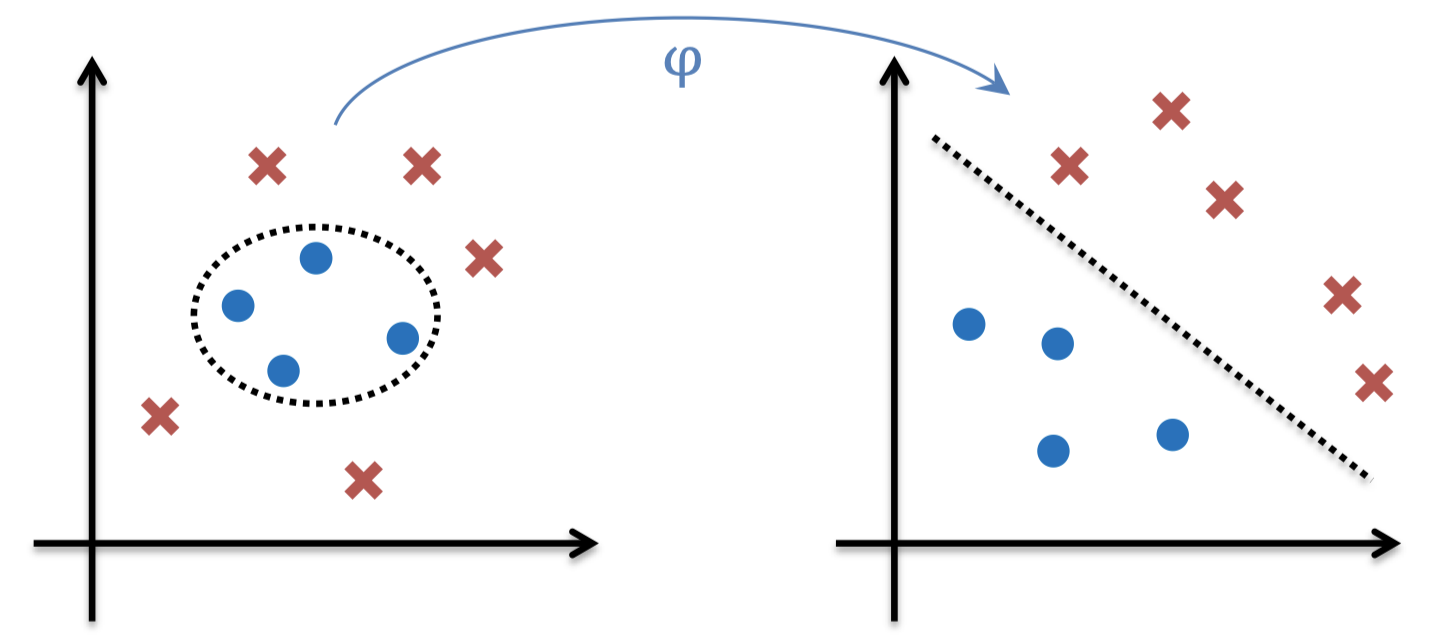
1.1 SVM 处理非线性数据
- 方法 1:软间隔 SVM(参考 Lecture 10)
- 方法 2:特征空间 变换(参考 Lecture 4)
- 将数据映射到一个新的特征空间
- 在新的特征空间中运行硬间隔或者软间隔 SVM
- 决策边界在原始特征空间中是非线性的
1.2 特征变换(基扩展)
- 考虑一个二分类问题
- 每个样本点具有特征 $[x_1, x_2]$
-
非线性可分
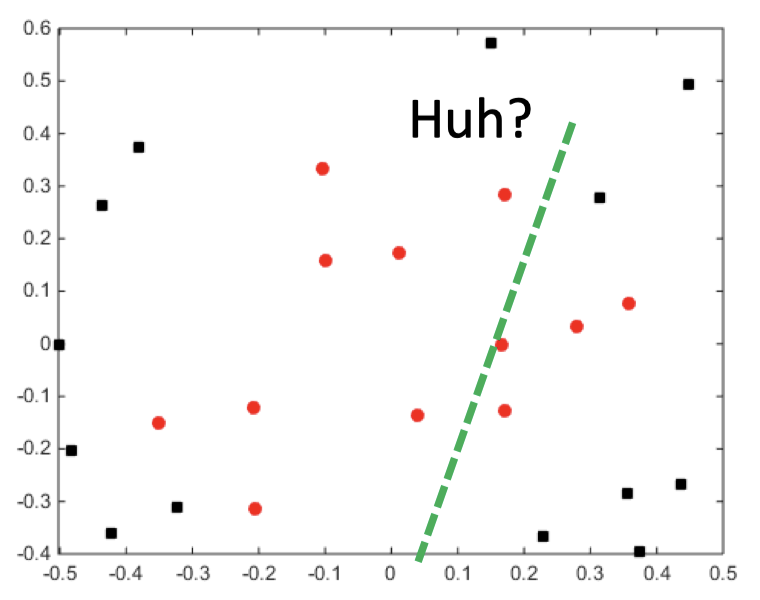
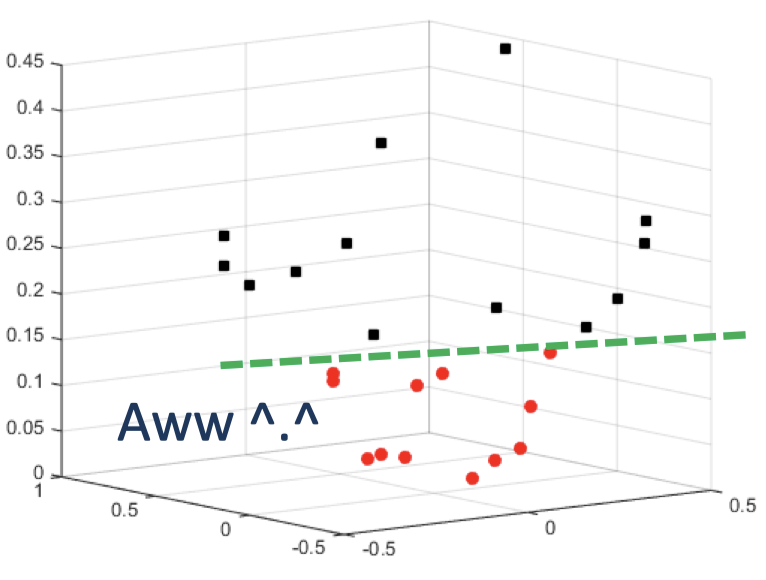
- 现在“增加”一个特征 $x_3=x_1^2+x_2^2$
- 每个样本点现在为 $[x_1, x_2, x_1^2+x_2^2]$
- 现在数据变成线性可分了
1.3 朴素工作流
- 选择 / 设计一个线性模型
- 选择 / 设计一个高维变换 $\varphi (\boldsymbol x)$
- 希望在添加了许多各种特征之后,其中一些特征将使数据变得线性可分
- 对于 每个 训练样本,以及 每个 新的实例,计算 $\varphi (\boldsymbol x)$
- 训练分类器 / 进行预测
- 问题: 对于高维 / 无限维的 $\varphi (\boldsymbol x)$,计算 $\varphi (\boldsymbol x)$ 是不现实 / 不可能的。
1.4 硬间隔 SVM 的对偶公式
- 训练: 寻找 $\boldsymbol \lambda$ 使得
- 预测: 根据 $s$ 的符号对实例 $\boldsymbol x$ 进行分类
注意:对于任意支持向量 $j$,通过求解 \(y_j(b^{*}+\sum_{i=1}^{n}\lambda_i^* y_i \color{red}{\fbox{$\color{black}{\boldsymbol x_i' \boldsymbol x_j}$}})=1\) 来找到 $b^*$
1.5 特征空间中的硬间隔 SVM
- 训练: 寻找 $\boldsymbol \lambda$ 使得
- 预测: 根据 $s$ 的符号对实例 $\boldsymbol x$ 进行分类
注意:对于任意支持向量 $j$,通过求解 \(y_j(b^{*}+\sum_{i=1}^{n}\lambda_i^* y_i \color{red}{\fbox{$\color{black}{\varphi (\boldsymbol x_i)' \varphi (\boldsymbol x_j)}$}})=1\) 来找到 $b^*$
1.6 观察:核表示
- 参数估计和计算预测都仅依赖于 点积 形式的数据
- 在原始特征空间:$\boldsymbol u’ \boldsymbol v=\sum_{i=1}^{m}u_i v_i$
- 在经过特征变换后的空间:$\varphi(\boldsymbol u)’ \varphi(\boldsymbol v)=\sum_{i=1}^{l}\varphi(\boldsymbol u)_i \varphi(\boldsymbol v)_i$
-
核函数 是可以在某些特征空间中表示为点积的函数
\[K(\boldsymbol u, \boldsymbol v)=\varphi(\boldsymbol u)' \varphi(\boldsymbol v)\]
1.7 核函数是一种捷径:例子
- 对于某些 $\varphi(\boldsymbol x)$,直接对核函数进行计算 要比先映射到特征空间然后再计算点积 更快。
- 例如,考虑两个向量 $\boldsymbol u =[ u_1 ]$ 和 $\boldsymbol v =[ v_1 ]$,以及变换 $\varphi(\boldsymbol x)=[ x_1^2, \sqrt{2c} x_1, c ]$,其中 $c$ 是某个常数
- 所以,$\varphi(\boldsymbol u)=[ u_1^2, \sqrt{2c} u_1, c ]’$(2 步操作)和 $\varphi(\boldsymbol v)=[ v_1^2, \sqrt{2c} v_1, c ]’$(+2 步操作)
- 然后,$\varphi(\boldsymbol u)’\varphi(\boldsymbol v)=(u_1^2 v_1^2+2cu_1 v_1+c^2)$ (+5 步操作 = 9 步操作)
-
这可以通过 直接计算核函数 来代替
\[\varphi(\boldsymbol u)' \varphi(\boldsymbol v)=(u_1 v_1 +c)^2\]- 现在只需 3 步操作
- 这里,$K(\boldsymbol u, \boldsymbol v)=(u_1 v_1 +c)^2$ 是相应的核函数
1.8 更通用的:“核技巧”
- 考虑两个训练数据点 $\boldsymbol x_i$ 和 $\boldsymbol x_j$,以及它们在经过变换后的特征空间中的点积。
- $k_{ij}\equiv \varphi(\boldsymbol x_i)’\varphi(\boldsymbol x_j)$ 核矩阵 可以按如下步骤计算:
- 计算 $\varphi(\boldsymbol x_i)’$
- 计算 $\varphi(\boldsymbol x_j)$
- 计算 $k_{ij}=\varphi(\boldsymbol x_i)’\varphi(\boldsymbol x_j)$
- 然而,对于某些变换 $\varphi$,存在一种“捷径”函数可以得到与 $K(\boldsymbol x_i,\boldsymbol x_j)=k_{ij}$ 完全相同的答案:
- 不包含上面的 1-3 步,而且没有计算 $\varphi(\boldsymbol x_i)$ 和 $\varphi(\boldsymbol x_j)$
- 通常,计算 $k_{ij}$ 的时间复杂度为 $O(m)$,但是计算 $\varphi(\boldsymbol x)$ 的时间复杂度为 $O(l)$,其中 $l \gg m$(计算上不现实)甚至 $l=\infty$(计算上不可行)
1.9 核函数硬间隔 SVM
-
训练: 寻找 $\boldsymbol \lambda$ 使得
\[\begin{array}{cc}\mathop{\operatorname{arg\,max}}\limits_{\boldsymbol \lambda}\sum_{i=1}^{n}\lambda_i-\dfrac{1}{2}\sum_{i=1}^{n}\sum_{j=1}^{n}\lambda_i \lambda_j y_i y_j \color{red}{\underbrace{\fbox{$\color{black}{K(\boldsymbol x_i, \boldsymbol x_j)}$}}_{\text{核函数}}}\\\\ \text{s.t.}\quad \lambda_i\ge 0 \;\text{and}\;\sum_{i=1}^{n}\lambda_i y_i=0 \end{array}\]特征映射通过核函数实现
-
预测: 根据 $s$ 的符号对实例 $\boldsymbol x$ 进行分类
\[s=b^*+\sum_{i=1}^{n}\lambda_i^* y_i \color{red}{\underbrace{\fbox{$\color{black}{K(\boldsymbol x_i, \boldsymbol x)}$}}_{\text{核函数}}}\]特征映射通过核函数实现
-
这里,我们注意到,对于任意支持向量 $j$,都有 \(y_j(b^{*}+\sum_{i=1}^{n}\lambda_i^* y_i \color{red}{\fbox{$\color{black}{K(\boldsymbol x_i, \boldsymbol x_j)}$}})=1\),可以以此来找到 $b^*$
1.10 非线性的处理方法
- ANN
- $\boldsymbol u=\varphi(\boldsymbol x)$ 中的元素是输入 $\boldsymbol x$ 经过变换得到的
- 该 $\varphi$ 具有从数据中学习得到的权重

- SVM
- 对核函数 $K$ 的选择决定了特征空间 $\varphi$
- 不学习 $\varphi$ 的权重
- 但是,甚至不需要计算 $\varphi$ 就可以支持高维
- 同样支持任意数据类型
-
思考:
1. 所有的用到了特征空间变换 $\varphi(\boldsymbol x)$ 的方法都用到了核函数吗?
不是的,虽然对于 SVM 是这样,但是回忆之前 Lecture 04 的内容,我们还在更为一般的条件下讨论过基扩展和特征映射,同样在神经网络中我们也可以使用特征映射。我们总是可以在进行特征映射之后应用机器学习算法,而有些算法并不需要涉及到点积的计算,记住核函数是对应于点积的,我们并不一定需要在机器学习中使用核函数。
2. 支持向量是来自于训练集中的点吗?
\[s=b^*+\sum_{i=1}^{n}\lambda_i^* y_i \color{red}{\underbrace{\fbox{$\color{black}{K(\boldsymbol x_i, \boldsymbol x)}$}}_{\text{核函数}}}\]
是的,支持向量是训练的样本,它们具有 非零对偶变量(即拉格朗日乘子 $\lambda_i\ne 0$)。所以当我们用 SVM 进行预测时(参考 “1.9 核函数硬间隔 SVM”):如果我们用对偶方程训练 SVM,我们不会得到任何 $w$,我们会得到很多不同的 $\lambda_i$,其中每一个都对应于一个训练样本,所有的 $\lambda_i$ 都要求非负(当然,其中很多可能为 $0$,这取决于你的数据和你所采用的特征映射),而其中那些 $\lambda_i$ 为 $0$ 的训练样本是那些落在最大间隔之外的点,它们并不 “支持着” 决策边界,因为 $\lambda_i$ 为 $0$ 会使得原始问题中约束条件失效,它们并不涉及 $w$ 的计算(事实上,它们并不涉及有关预测值的计算)。通过观察上面的式子,可以发现不论核函数 $K(\boldsymbol x_i, \boldsymbol x)$ 等于多少,只要 $x_i$ 对应的 $\lambda_i=0$,那么在求和时该项就会被消掉,这就是为什么 支持向量 非常重要的原因。它们之所以重要不是因为有一个时髦的名称,它们从实质上来帮助 SVM 进行预测,它们实际上是一些对于 SVM 的训练非常重要的样本。所以,如果在非支持向量的训练样本中存在一些噪声,通常不会对结果有什么影响;只有那些属于支持向量的训练样本是至关重要的。
3. 我们总是可以通过特征映射 $\varphi(\boldsymbol x)$ 使得数据完美线性可分吗?
不是的,假如我不告诉你关于数据的任何信息,可能存在两个不同的样本 $\boldsymbol x_i$ 对应相同的 $y_i$ 的情况,这是有可能发生的,其原因可能不是由于测量数据的方法导致的,它有可能是由于存在隐变量,或者 $y$ 的噪声导致的。所以,问题中的说法并不准确,更恰当的说法是:通常情况下,我们都可以通过特征映射 $\varphi(\boldsymbol x)$ 使得数据 更加 线性可分。
2. 模块化学习
SVM 之外的核化;将 “学习模块” 从特征空间变换中分离出来
2.1 模块化学习
- 与特征映射相关的所有信息都浓缩在核函数中
- 为了使用一种不同的特征映射,只需要简单地更换核函数即可
- 算法设计可以分为:选择 “学习方法”(例如,SVM vs Logistic 回归)和选择特征空间映射,即核函数。
2.2 核化感知器
- 当分类正确时,权重不会更新
- 当分类错误时:$\boldsymbol w^{k+1}=-\eta(\pm \boldsymbol x)$(其中,$\eta>0$ 被称为 学习率)
- 如果 $y=1$,但是 $s<0$
$w_i\leftarrow w_i+\eta x_i$
$w_0\leftarrow w_0+\eta$ - 如果 $y=-1$,但是 $s\ge 0$
$w_i\leftarrow w_i-\eta x_i$
$w_0\leftarrow w_0-\eta$
- 如果 $y=1$,但是 $s<0$
假设所有权重的初始值都设为 $0$
第一次更新:$\boldsymbol w=\eta y_{i_1}\boldsymbol x_{i_1}$
第二次更新:$\boldsymbol w=\eta y_{i_1}\boldsymbol x_{i_1}+\eta y_{i_2}\boldsymbol x_{i_2}$
第三次更新:$\boldsymbol w=\eta y_{i_1}\boldsymbol x_{i_1}+\eta y_{i_2}\boldsymbol x_{i_2}+\eta y_{i_3}\boldsymbol x_{i_3}$
…
- 权重总是具有形式 $\boldsymbol w=\sum_{i=1}^{n}\alpha_i y_i\boldsymbol x_i$,其中 $\boldsymbol \alpha$ 是一些系数
- 感知器的权重总是数据的 线性组合
- 回忆一个新的数据点 $\boldsymbol x$ 的预测是基于 $w_0+\boldsymbol w’\boldsymbol x$ 的符号
- 将 $\boldsymbol w$ 进行替换,我们得到 $w_0+\sum_{i=1}^{n}\alpha_i y_i\boldsymbol x_i’\boldsymbol x$
- 点积 $\boldsymbol x_i’\boldsymbol x$ 可以被替换为一个 核函数
算法描述:
选择初始权重 $\boldsymbol w^{(0)}, k=0$
设定 $\boldsymbol \alpha=\boldsymbol 0$
对于 $t$ 从 $1$ 到 $T$(轮):
$\qquad$ 对于每个训练样本 \(\{\boldsymbol x_i,y_i\}\):
$\qquad \qquad$ 基于 \(w_0+\sum_{j=1}^{n}\alpha_j y_j \color{red}{\underbrace{\fbox{$\color{black}{\boldsymbol x_i' \boldsymbol x_j}$}}_{\text{核矩阵} k_{ij}}}\)
$\qquad \qquad$ 如果分类错误,更新 $\alpha_i \leftarrow \alpha_i+1$
2.3 表示定理
-
定理: 对于任何训练集 \(\{\boldsymbol x_i,y_i\}_{i=1}^{n}\),任何经验风险函数 $E$,单调递增函数 $g$,然后任何解
\[f^* \in \mathop{\operatorname{arg\,min}}\limits_f E(\boldsymbol x_1,y_1,f(\boldsymbol x_1),...,\boldsymbol x_n,y_n,f(\boldsymbol x_n))+g(\|f\|)\]都有对应某些系数的表示:
\[f^*(\boldsymbol x)=\sum_{i=1}^{n}\alpha_i k(\boldsymbol x,\boldsymbol x_i)\]注:$f$ 位于 再生核希尔伯特空间(RKHS)
- 表示定理告诉我们(决策理论)学习器什么时候可以核化
- 对偶告诉我们该线性核表示的形式
- SVM 只是一个例子,其他还包括诸如:
- 岭回归
- Logistic 回归
- 主成分分析(PCA)
- 典型相关分析(CCA)
- 线性判别分析(LDA)
- 还有很多…
3. 构造核函数
一些流行的核函数及其属性概述
3.1 多项式核
- 函数 $K(\boldsymbol u,\boldsymbol v)=(\boldsymbol u’\boldsymbol v+c)^d$ 被称为 多项式核
- 这里 $\boldsymbol u$ 和 $\boldsymbol v$ 都是 $m$ 维的向量
- $d \ge 0$ 是一个整数,$c\ge 0$ 是一个常数
- 不失一般性地,假设 $c=0$
- 如果并非如此,将 $\sqrt{c}$ 作为哑变量特征添加到 $\boldsymbol u$ 和 $\boldsymbol v$
- 推导如下:
\(\begin{eqnarray} (\boldsymbol u'\boldsymbol v)^d &=& (u_1v_1+\cdots+u_mv_m)(u_1v_1+\cdots+u_mv_m)...(u_1v_1+\cdots+u_mv_m)\\ &=& \sum_{i=1}^{l}(u_1v_1)^{a_{i_1}}...(u_mv_m)^{a_{i_m}}\qquad \color{red}{\text{(这里}\, 0\le a_{ij}\le d \,\text{和}\, l \,\text{都是整数)}}\\ &=& \sum_{i=1}^{l} (u_1^{a_{i_1}}...u_m^{a_{i_m}})(v_1^{a_{i_1}}...v_m^{a_{i_m}})\\ &=& \sum_{i=1}^{l}\varphi(\boldsymbol u)_i \varphi(\boldsymbol v)_i \end{eqnarray}\) - 特征映射 $\varphi: \Bbb R^m \rightarrow \Bbb R^l$,其中 $\varphi_i(\boldsymbol x)=(x_1^{a_{i_1}}…x_m^{a_{i_m}})$
3.2 检查核函数的合法性
- 方法 1: 给定合法的核函数 $K_1(\boldsymbol u, \boldsymbol v), K_2(\boldsymbol u, \boldsymbol v)$,常数 $c>0$,并且 $f(\boldsymbol x)$ 是一个实值函数。那么,下面的每个函数都是一个合法的核函数:
- $K(\boldsymbol u,\boldsymbol v)=K_1(\boldsymbol u,\boldsymbol v)+K_2(\boldsymbol u,\boldsymbol v)$
- $K(\boldsymbol u,\boldsymbol v)=cK_1(\boldsymbol u,\boldsymbol v)$
- $K(\boldsymbol u,\boldsymbol v)=f(\boldsymbol u)K_1(\boldsymbol u,\boldsymbol v)\,f(\boldsymbol v)$
- 更多实例,请参考 PRML by Bishop
- 方法 2: 利用 Mercer 定理
3.3 径向基函数核
- 函数 \(K(\boldsymbol u,\boldsymbol v)=\exp(-\gamma \| \boldsymbol u-\boldsymbol v\|^2)\) 被称为 径向基函数核(又称 高斯核)
- 这里 $\gamma>0$ 是 spread 参数
- 推导如下:
\(\begin{eqnarray} \exp(-\gamma \| \boldsymbol u-\boldsymbol v\|^2) &=& \exp\left(-\gamma (\boldsymbol u-\boldsymbol v)'(\boldsymbol u-\boldsymbol v)\right)\\ &=& \exp\left(-\gamma (\boldsymbol u'\boldsymbol u-2\boldsymbol u'\boldsymbol v+\boldsymbol v'\boldsymbol v)\right)\\ &=& \exp(-\gamma \boldsymbol u'\boldsymbol u)\exp(2\gamma \boldsymbol u'\boldsymbol v)\exp(-\gamma \boldsymbol v'\boldsymbol v)\\ &=& f(\boldsymbol u)\exp(2\gamma \boldsymbol u'\boldsymbol v)\,f(\boldsymbol v)\\ &=& f(\boldsymbol u)\left(\sum_{d=0}^{\infty}r_d(\boldsymbol u'\boldsymbol v)^d\right)\,f(\boldsymbol v) \qquad \color{red}{\text{(指数函数的泰勒展开)}} \end{eqnarray}\) - 这里,每个 $(\boldsymbol u’\boldsymbol v)^d$ 都是一个 多项式核。利用核函数的性质,可知中间部分也是一个合法的核函数,因此,最终整个表达式是一个合法的核函数。
3.4 Mercer 定理
- 问题:给定一个映射 $\varphi(\boldsymbol u)$,是否存在一个合法的核函数?
-
逆问题:给定某个函数 $K(\boldsymbol u,\boldsymbol v)$,它是一个合法的核函数吗?换而言之,是否存在一个映射 $\varphi(\boldsymbol u)$ 是由这个核函数实现的?
- Mercer 定理:
- 考虑一个有限序列 $\boldsymbol x_1,…,\boldsymbol x_n$
- 构造一个由成对的值 $K(\boldsymbol x_i,\boldsymbol x_j)$ 组成的 $n\times n$ 的矩阵
- 如果这个矩阵是 半正定的,那么 $K(\boldsymbol x_i,\boldsymbol x_j)$ 是一个合法的核函数,这一点对于所有可能的序列 $\boldsymbol x_1,…,\boldsymbol x_n$ 都满足
3.5 各种不同类型的输入数据
- 到目前为止,本课程 COMP90051 涉及的数据都是由数字组成的向量
- 但是,如果我们想在不同类型的数据上应用机器学习该怎么办?
- 图
- Facebook, Twitter, …
- 可变长度序列
- “science is organized knowledge”, “wisdom is organized life”, …
- “CATTC”, “AAAGAGA”
- 歌曲,电影等等
3.6 处理任意数据结构
- 核函数是一种强大的方法可以处理很多不同的数据类型
- 可以在可变长度的字符串上定义相似度函数:
$K($“science is organized knowledge”, “wisdom is organized life”$)$ - 然而,不是所有的作用在两个对象上的函数都是一个合法的核函数
- 记住,我们需要核函数 $K(\boldsymbol u,\boldsymbol v)$ 在某个特征空间实现点积的计算
总结
- 核函数
- 基扩展处理非线性
- 核技巧加速计算
- 模块化学习
- 将 “学习模块” 从特征变换中分离出来
- 表示定理
- 构造核函数
- 一些流行的核函数及其属性概述
- Mercer 定理
- 将机器学习扩展到常规数据结构之外
下节内容:集成学习
本作品采用知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议进行许可。 欢迎转载,并请注明来自:YEY 的博客 同时保持文章内容的完整和以上声明信息!