Lecture 01 导论
1. 课程简介
1.1 教学人员
- 讲师
- Chris Ewin
2018 年 PhD 毕业于墨尔本大学。主要研究兴趣为自动规划领域:- 知识表示(Knowledge representation)
- 富域规划(Planning in rich domains)
- 情景演算(Situation Calculus)
爱好:网球 🎾
办公室:DMD building, office 9.23
邮箱:cewin@unimelb.edu.au - Tim Miller
2005 年 PhD 毕业于昆士兰大学。主要研究兴趣为人工智能领域:- 多智能体环境下的决策(Decision making in multi-agent environments)
- 行动与知识推理(Reasoning about action and knowledge)
- 自动规划(Automated planning)
- 人机交互与协作(Human-agent interaction and collaboration)
爱好:咖啡 ☕️ 以及与之相关的一切 办公室:DMD building, office 6.09
邮箱:tmiller@unimelb.edu.au
- Chris Ewin
- 助教团队
来自一些以前在这门课程中拿到高分的学生,以及一些 PhD 和 Research 的学生:- 主管助教:Guang Hu
办公室:DMD building, office 6.13
邮箱:ghu1@student.unimelb.edu.au - 助教
Prashan Mathugama, Anam Ahmad Khan, Anubhav Singh, Ruihan Zhang
- 主管助教:Guang Hu
1.2 研讨会
- Workshops 将从第 2 个教学周开始
- 由于 COVID-19 疫情影响,以下时间段的 workshops 将改为线上模式:
- Mon, 16:15-17:15. Location: PAR-207-221 Bouverie St-B132
- Mon, 17:15-18 :15. Location: PAR-Elec. Engineering-122
- Tue, 18:15-19 :15. Location: PAR-Elec. Engineering-121
- Fri, 12:00-13:00, Location: PAR-Engineering B-313
- 注意:请仅在受到 COVID-19 疫情影响的情况下注册线上模式。
- Zoom 链接将在 LMS 上提供。
1.3 课程大纲
- AI 与自动规划导论
- 经典规划:有很多强假设(strong assumptions),我们基于这些假设求解规划问题。
- 启发式搜索(Heuristic Search)
- 基于宽度搜索(Width-Based Search)
- 超越经典规划:
- 无因子模型(Factored-Model-Free)
- 非决定论(Non Determinism)
- 不确定性(Uncertainty)
- 软目标(Soft goals)
- 规划识别(Plan Recognition)
- 认知(社会)规划(Epistemic (social) Planning)
- 路径计划(Path-Planning)
- 控制(Control)
- 强化学习(Reinforcement Learning):从经验中学习
- 多智能体规划(Multi agent Planning)
- 关于人工智能伦理(AI Ethics)的热门 / 最新讨论
作业:2 次个人作业;1 次比赛形式的作业。
1.4 预备知识
- 算法相关知识,例如:动态规划
- 基本集合论与命题逻辑
- 概率论,例如:条件概率
- Python
重要的是,你需要及时复习和理解讲义,因为大多数讲座都是建立在以前的知识基础上的。
一个在线演示规划算法的网站:https://qiao.github.io/PathFinding.js/visual/
2. 关于人工智能的定义
我们将就以下话题展开一些简短的讨论:
- AI 的概念:当我们谈论 AI 时,我们究竟在谈论什么?
弄清(现代)人工智能的研究领域正在做、不会做和将要尝试做的事情。 - AI 的历史:这一切是如何发生的?
一个简短的背景介绍:我们是如何从 “经典 AI” 转变为 “现代 AI” 的。 - AI 的现状:技术和应用前景如何?
一段粗略的概述和一些例子。
2.1 什么是人工智能?
关于人工智能的定义,一种工程学的观点是:
“The science of making machines do things that would require intelligence if done by humans.”
—— Marvin Minsky
在70年的人工智能浪潮中,马文 $\cdot$ 明斯基(Marvin Minsky)是一个如雷贯耳的名字,与机器学习、神经网络、虚拟现实、框架理论等热门名词紧紧联系在一起。他是定义和发展 “人工智能” 的先驱者之一,也是人工智能领域的首位图灵奖获得者,被尊称为 “人工智能之父”。
关于人工智能,Minsky 给出的定义是:人工智能这门学科研究的是如何制造出能完成某些事情的机器,而这些事情如果由人类来完成的话,则需要涉及到智能。
但是,这种定义是否具有可操作性可能需要打个问号:
- 我们如何能够知道哪些 人类 活动涉及到智能?
- 另外,如何定义人类的智能?
2.2 图灵测试
图灵测试(The Turing test)由艾伦·麦席森·图灵发明,指测试者与被测试者(一个人和一台机器)隔开的情况下,通过一些装置(如键盘)向被测试者随意提问。进行多次测试后,如果有超过30%的测试者不能确定出被测试者是人还是机器,那么这台机器就通过了测试,并被认为具有人类智能。图灵测试一词来源于计算机科学和密码学的先驱阿兰·麦席森·图灵写于 1950 年的一篇论文《计算机器与智能》,其中 30% 是图灵对 2000 年时的机器思考能力的一个预测,目前我们已远远落后于这个预测。
但是,它目前还只能从理论上证明,无法被复现出来。
2.3 另一种关于人工智能的定义
这里是另一种关于人工智能的视角:
“The exciting new effort to make computers think. Machines with minds, in the full and literal sense.”
—— John Haugeland
和 Minsky 给出的定义存在同样的问题:
- 什么是 thinking(思考)?
- 什么是 mind(心灵)?
2.4 一种理性的视角
关于人工智能,这里给出了一种理性的视角:
“The branch of computer science that is concerned with the automation of intelligent behavior.”
—— Luger and Stubblefield
- 智能行为(Intelligent behavior):做出 “好的”(理性的)选择
- 人类真的是 “理性(rational)” 的 Agents 吗?
我们经常 犯错;我们并不全是国际象棋大师,即便我们可能已经知道关于国际象棋的所有规则。更多关于人类系统性的错误可以参考 Daniel Kahneman 的著作 Thinking, fast and slow。
2.5 理性 Agent
- Agents:
- 通过 传感器(sensors) 感知环境($\to$ 认知(percepts))
- 通过 执行器(actuators) 对环境采取行动($\to$ 行动(actions))
$\color{blue}{\to}$ 例如:人类、动物、机器人、软件智能体(软件机器人)等等。
-
理性 Agent(Rational Agents) 会选择做 “正确的事(the right thing)”。
$\color{blue}{\to}$ 什么是 “做正确的事”?
$\quad$理性 Agent 选择它们的行动(actions)以最大化 性能度量(performance measure)
$\color{blue}{\to}$ 问题:一台自动吸尘器的性能度量是什么?
$\quad$每小时清洁面积 $\mathrm{m^2/h}$ 、清洁程度、能耗等等。
$\color{blue}{\to}$ 如果这台自动吸尘器的传感器不够好会发生什么?
-
尝试做 “正确的事”!
$\to$ 假设的最佳情况(“正确的事”)通常无法达到。
$\color{blue}{\to}$ Agent 可能无法感知所有的相关信息。(例如:床底下是否有污垢?) - 理性(Rationality) vs. 全知(Omniscience):
- 一个 全知 Agent(omniscient agent)知道关于环境的一切信息,并且知道它的行动将带来的实际效应。
- 一个 理性 Agent(rational agent)只是充分利用了它所拥有的资源,在其感知 (percepts)和知识(knowledge)的基础上最大化了预期的性能。
$\color{blue}{\to}$ 例如:过马路之前,我检查过交通状况。在穿越时,我被一颗陨石击中了。我缺乏理性吗?
- 将输入映射到可能的最佳输出:
性能度量 $\times$ 感知 $\times$ 知识 $\to$ 行动
$\color{blue}{\to}$ 人工智能作为一种思想大致可以从 思维 vs. 行动 和 人性 vs. 理性 的维度进行分类:人性 理性 思维 像人类一样思考的系统(认知科学) 理性思考的系统(逻辑:知识与演绎) 行动 具有类似人类行为的系统(图灵测试) 理性行动的系统(如何做出好的行动选择) $\to$ 智能的一个核心方面(以及一种可能的定义方式)就是在世界上 成功行动的能力。
3. 人工智能简史
-
AI 的起源:Darmouth 1956
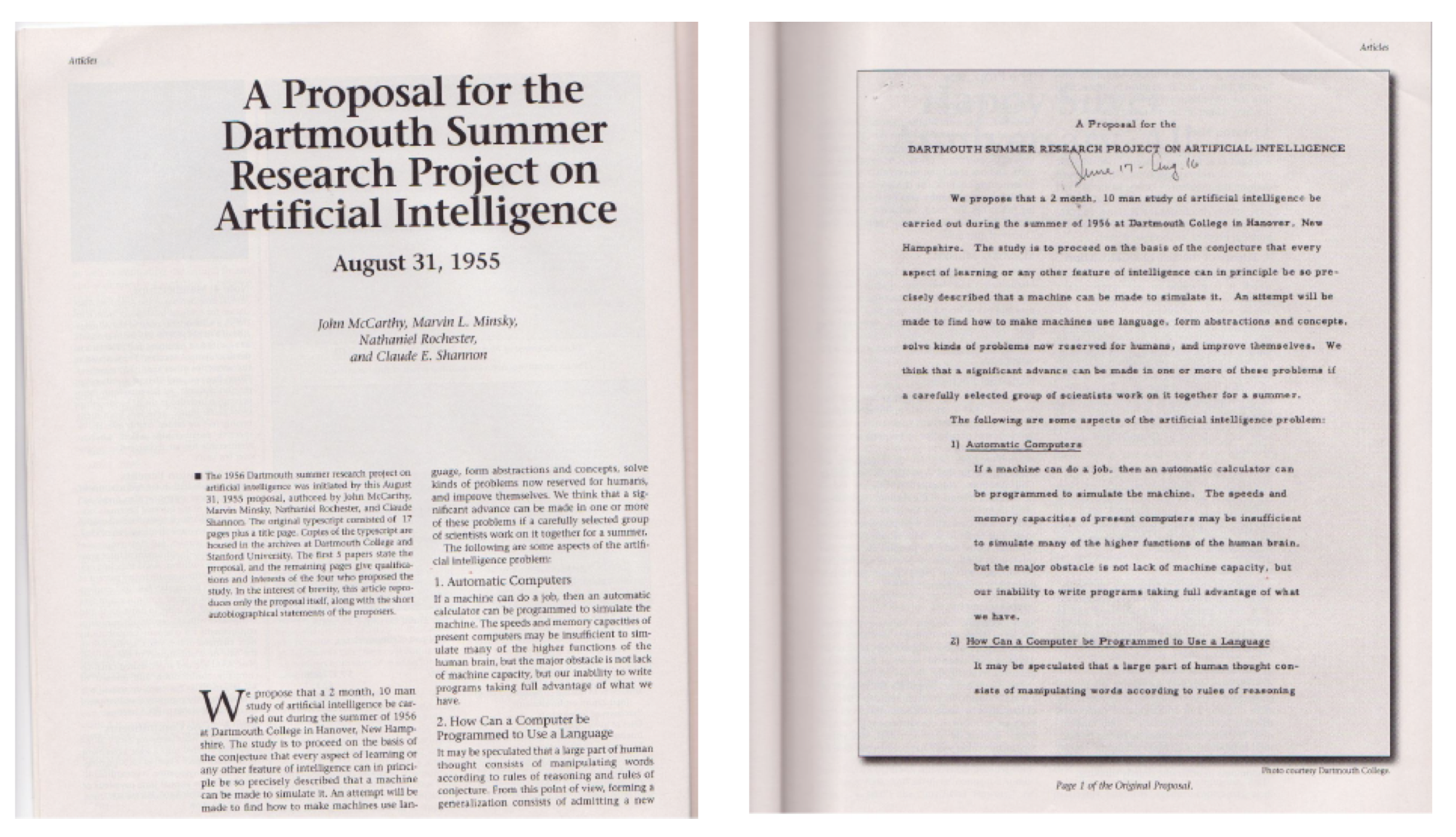
1956 年 8 月,在美国汉诺斯小镇宁静的达特茅斯学院中,约翰$\cdot$麦卡锡(John McCarthy,人工智能之父、LISP 语言发明者)、马文$\cdot$明斯基(Marvin Minsky,人工智能与认知学专家)、克劳德$\cdot$香农(Claude Shannon,信息论的创始人)、艾伦$\cdot$纽厄尔(Allen Newell,计算机科学家)、赫伯特$\cdot$西蒙(Herbert Simon,诺贝尔经济学奖得主)等科学家正聚在一起,讨论着一个完全不食人间烟火的主题:用机器来模仿人类学习以及其他方面的智能。会议的提案是基于这样一种设想:原则上,智能的每一个方面都可以被精确地描述,以至于可以制造一台机器来模拟它。 会议足足开了两个月的时间,虽然大家没有达成普遍的共识,但是却为会议讨论的内容起了一个名字:人工智能。因此,1956 年也就成为了人工智能元年。
-
Computers and Thought 1963
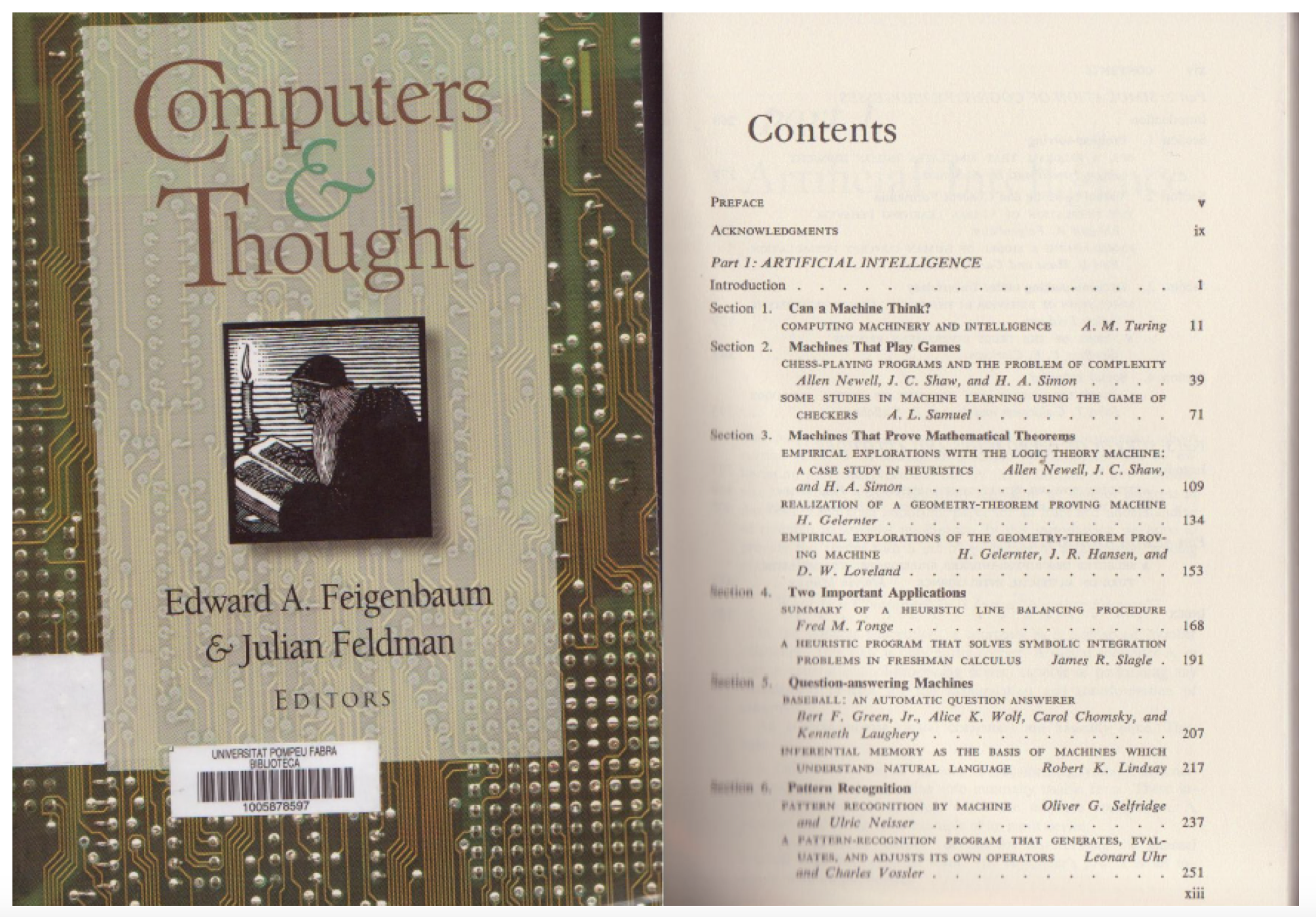
1963 年出版的 Computers and Thought 杂志收录了一些早期的有关 AI 下国际象棋和跳棋的论文和程序,证明了一些关于逻辑、几何和规划的定理。
- AI:60 年代、70 年代和 80 年代
在 60 年代、70 年代和 80 年代早期,人工智能的许多重要贡献都与 程序设计 和程序中的 知识表示 有关:
- Lisp(函数式编程)
- Prolog(逻辑编程)
- 基于规则的程序设计
- “专家系统” 的 Shells 和架构
- AI 方法论:理论即程序
在 60 年代、70 年代和 80 年代,一篇 AI 相关的学位论文通常是:- 选择一项任务和一个域 X
- 分析 / 反思 / 找到如何解决任务
- 在程序中刻画这种推理
然后,这篇论文就是:
- 一个关于 X (科学发现、电路分析、计算幽默、故事理解等)的理论,以及
- 一个实现该理论的 程序,并通过一些示例进行了 测试。
这种工作模式产生了许多很好的想法……但有一个问题……
-
方法论存在的问题
$\to$ 用程序来表达的理论无法被证伪:当程序失败时,总是可以归咎于 “知识缺失”。解决问题的三种方法:
- 缩小域(专家系统)
- 问题:缺少泛化性
- 接受程序只是一种说明或者一种演示
- 问题:科学价值有限
- 填补缺失的知识(直觉、常识)
- 问题:到目前为止还没有成功
- 缩小域(专家系统)
- AI 寒冬:80 年代
$\color{blue}{\to}$ 基于知识的方法在 80 年代陷入 僵局,这也是一个充满争议和争论的时代:- 好的老式 AI 只是一种 “规则应用”,但智能不是(Haugeland)
对主流 AI 的许多批评对于当时有一部分是适用的;对于现在则不太适用。
- AI:从 90 年代到 2018
AI 技术的形式化和更多数学知识的应用。一些顶级期刊如 AIJ、JAIR、AAAI 和 IJCAI 上的最新论文的研究领域有:- SAT和约束
- 搜索和规划
- 概率推理
- 概率规划
- 一阶逻辑推理
- 机器学习
- 自然语言
- 视觉和机器人
- 多智能体系统
$\color{blue}{\to}$ 领域 1 到 4 通常被认为是关于技术的,但更准确的看法是将它们视为 模型和求解器。
4. 目前的方向
这些领域背后的共同点是:相比于解决某些特定域下的某些特定问题,我们真正试图尝试的是构建一些智能系统,以解决一些更加通用的问题。
4.1 求解器
\[\mathrm{Problem} \; \Longrightarrow \; \fbox{$\mathrm{Solver_{\,}}$} \; \Longrightarrow \; \mathrm{Solution}\]例子:
- 问题:John 的年龄是 Peter 的 3 倍。在 10 年以内,它将变为只有 2 倍。请问 John 和 Peter 现在的年龄是多少?
- 表示为:$\mathrm{J}=3\mathrm{P}\; ;\;\mathrm{J}+10=2(\mathrm{P}+10)$
- 求解器:Gauss-Jordan(变量消除)
- 解为:$\mathrm{P}=10\; ;\;\mathrm{J}=30$
这就是我们如今尝试在做的事情:构建一个可以解决一些通用的问题的求解器。
求解器的 通用性 体现在其能够处理任何可以表示为一个 模型 实例的问题。
然而,线性方程模型是 易处理的(tractable),我们可以在一个合理的时间内对其进行计算求解;但对于 AI 模型,情况并非如此。
4.2 AI 求解器
\[\mathrm{Problem} \; \Longrightarrow \; \fbox{$\mathrm{Solver_{\,}}$} \; \Longrightarrow \; \mathrm{Solution}\]- 基本模型与任务包括:
- 约束满足 / SAT:寻找满足约束的状态
- 规划问题:寻找能够产生所需状态的行动序列
- 带反馈规划:寻找能够产生所需状态的策略
- 这些模型的求解器是 通用的;并非专门针对某些特定实例。
- 所有这些模型都是 难处理的(intractable),而且有些模型非常强大。例如:POMDPs(部分可观马尔可夫决策过程)
- 挑战主要是计算方面的:如何进行大规模扩展。
- 为此,求解器必须能够 识别和利用(recognize and exploit) 问题的 结构(structure)。
- 我们采用的方法论是 经验主义的(empirical):我们不去比较哪种模型更复杂,我们会采用一些现实世界的基准,让不同的模型进行竞争。
4.3 SAT 和 CSPs
SAT(布尔可满足性问题):确定一组子句(clauses)的组合是否存在可能满足的情况。(即结果为 TRUE)例如:
\[x\lor \lnot y \lor z\lor \lnot w \lor \dots\]对于上面的例子求解非常简单,可以发现,只要 $x$ 为 TRUE,那么这整个陈述(statement)为 TRUE。如果只有一个子句,这会很简单;但是,很多情况下,我们会遇到包含成千上万的子句的情况,这会导致问题变得非常困难。
- 事实上,这已经被证明是一个 NP 完全问题。,在实践中这意味着 SAT 算法在最坏情况下,时间复杂度与变量数量之间呈 指数的(exponential) 关系。(例如:$100$ 个变量的时间复杂度为 $2^{100}=10^{30}$)
- 然而,目前的 SAT 求解器设法解决了 成千上万个变量 和子句的问题,并得到了广泛的应用。(例如:电路的设计、验证、规划等)
- 约束满足问题(CSPs) 是对 SAT 问题的的泛化,它可以容纳非布尔变量,以及非子句约束。
- 关键是在搜索树的每个结点中进行 高效(多项式时间)推理:单位解析(unit resolution)、基于冲突的学习(conflict-based learning) 等等。
- 还有很多其他想法从 逻辑上可行,但是 无法实现(无法大规模扩展):纯搜索、纯推理等。
4.4 经典规划模型
- 规划(Planning)是实现自主行为(autonomous behavior)的一种 基于模型的方法。
- 一个系统可以处于很多种 状态(states) 之一。
- 状态会对一个 变量 的集合进行 赋值。
- 行动(Actions) 会改变某些特定变量的值。
- 基本任务:寻找能够驱动 初始 状态转变为 目标 状态的 行动序列(action sequence)。
- 复杂度:NP 困难;即 最坏情况下,与变量的数量呈指数关系。
- 规划器(Planner):是通用的;无论变量是什么,它都应该能在任何域上工作。
5. AI 对于我们的意义
5.1 为什么我们需要这种 AI
- 国家象棋:2 名玩家的零和游戏(zero-sum game)
- 音乐 / 语音识别
- 推荐系统
- 医疗诊断:决策支持系统
- 自动驾驶汽车
- 玩 Atari 游戏:深度学习
- ……
5.2 为什么我们需要这种 AI 规划
需要更强自主性(autonomy)设定的一些场景:
- 太空探索:(RAX)第一个人工智能控制系统,无需人为监督即可控制航天器。(1998)
- 业务流程管理
- 第一人称视角射击和游戏:经典规划器玩 Atari 游戏
- 互动故事(Interactive Storytelling)
- 网络安全
- 物流 / 运输 / 制造业:多模式运输、森林灭火、PARC 打印机
- ……
更多内容请参考:Special Interest Group for Applications of AI Planning and Scheduling
6. 总结:AI 和自动问题求解
- 过去 20 年出现的 研究议程:一系列 难处理模型(intractable models) 的 求解器。
- 与其他程序不同,求解器 具有 通用性,因为它们不针对单个问题,而是针对一个问题系列(模型)。
- 挑战在于 计算:如何大规模扩展。
- 问题的绝对规模 不应妨碍有意义的解决方案。
- 对于给定问题的 结构,必须能够识别和 利用(exploit)。
- 有很多 想法 的余地,但方法论是 经验性的。
- 持续 进步
- 有效的推论方法:h 推导、冲突学习……
- 可处理岛(islands of tractability):树宽度方法(treewidth methods)、松弛(relaxations)
- 转换:收集不完整的信息、扩展目标……
下节内容:搜索算法
本作品采用知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议进行许可。 欢迎转载,并请注明来自:YEY 的博客 同时保持文章内容的完整和以上声明信息!